Introduction
My Master’s project involves the development of soft robotic devices for rehabilitation, focusing on assisting movement about joints. The main aim was to create a validated FE model of the interaction between an SPA and upper arm, looking at stresses induced to determine pressure injury.
The project combines finite element analysis (FEA) in Marc Mentat with experimental validation through physical testing to ensure the models created are correct. By simulating the interaction and analysing the resulting skin stresses, I will evaluate the safety and effectiveness of the actuators. This in turn will determine optimisation parameters for the SPAs themselves.
SPA Model
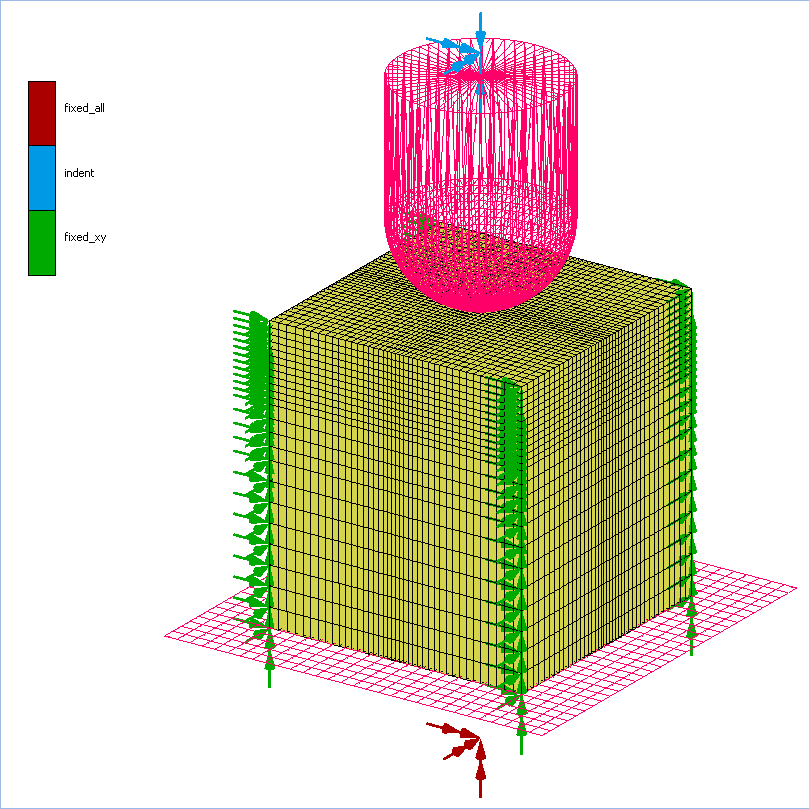
SPA FE Model
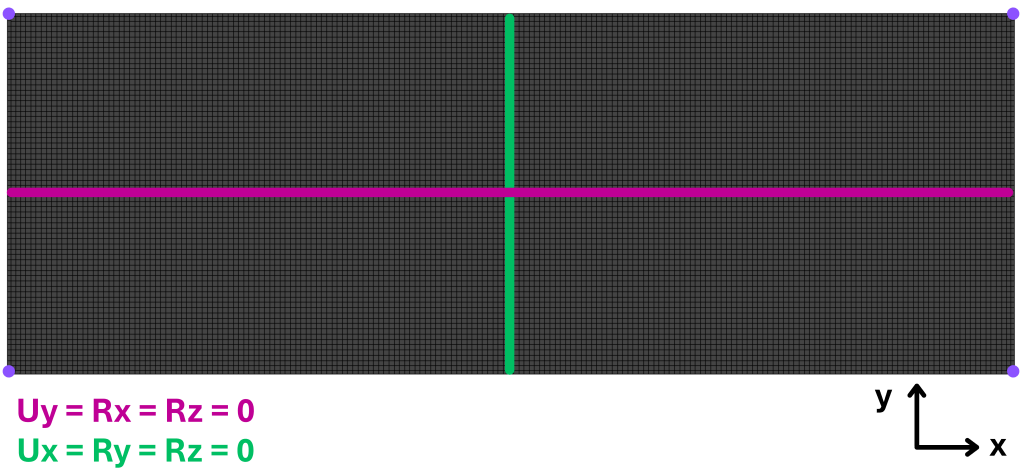
An SPA FE model was developed in Marc Mentat, with appropriate boundary conditions to prevent rigid body motion

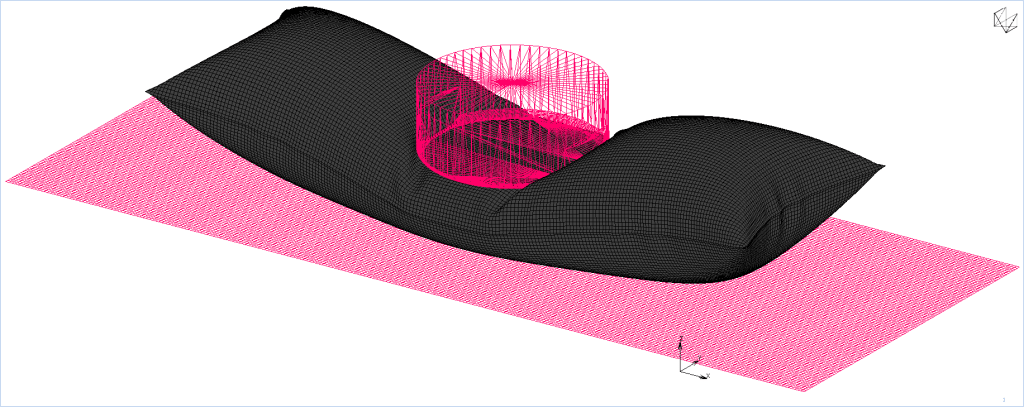
SPA Validation
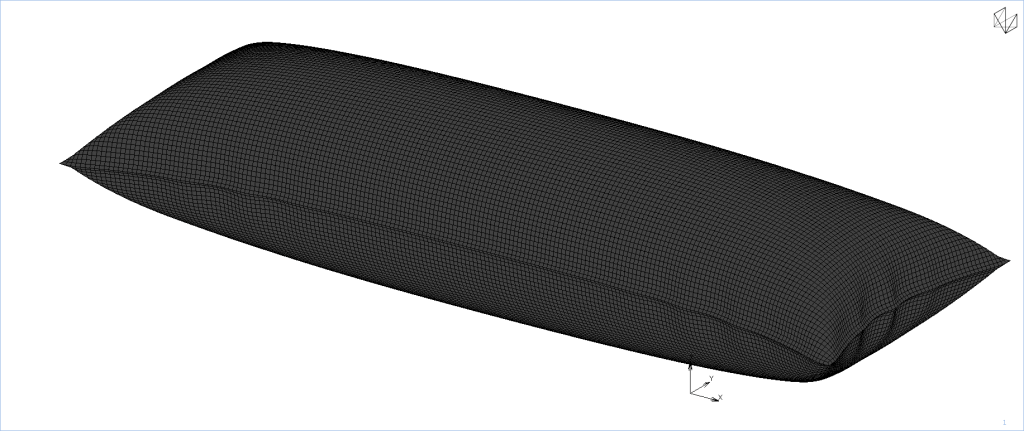
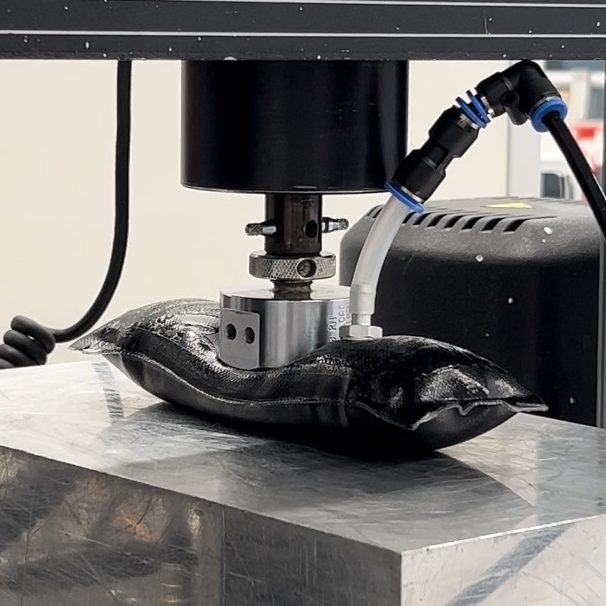
A compression experiment was designed to analyse the behaviour between the model and a real-life prototype.
Skin FE Model
A skin indentation test was replicated on FE to determine appropriate material properties. Boundary conditions were used to prevent rigid body motion. This model was then validated against experimental data and showed to produce behaviour that lay within a range.
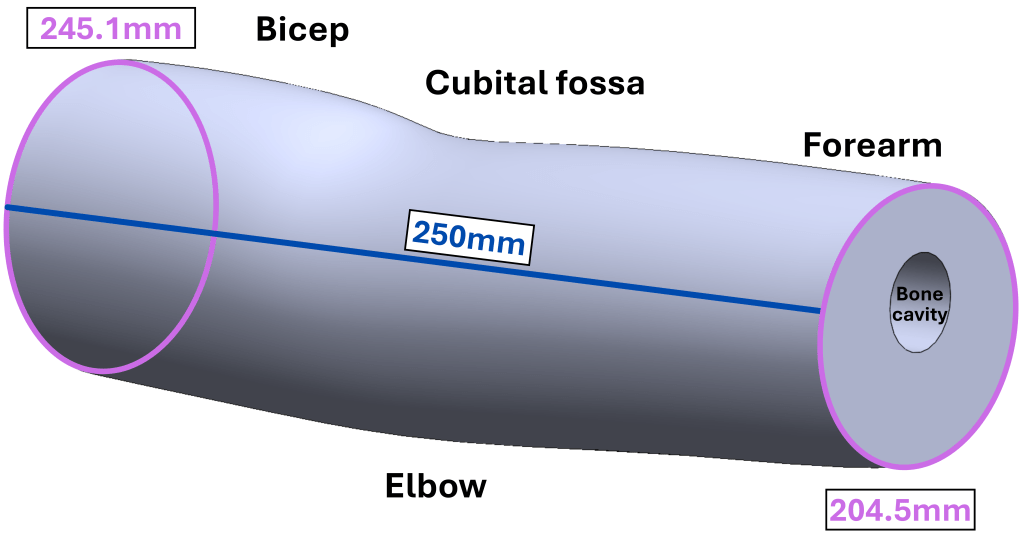
Arm Model
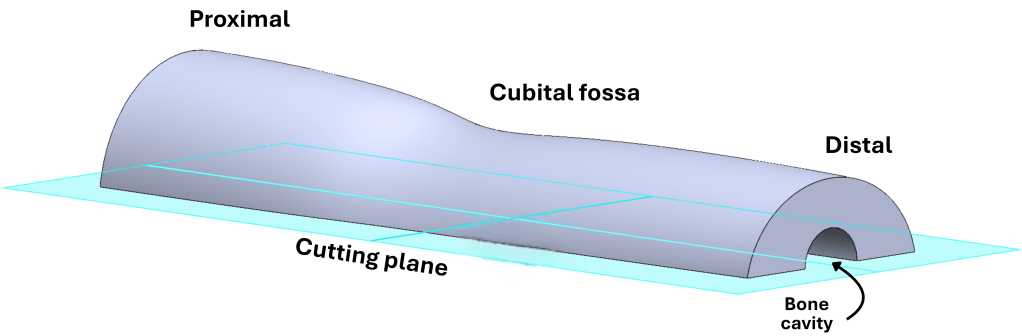
An arm model was created using SolidWorks with dimensions that match ones found in literature
After completing a mesh convergence, it was determined that the full arm model could be reduced to half to save on computational cost.
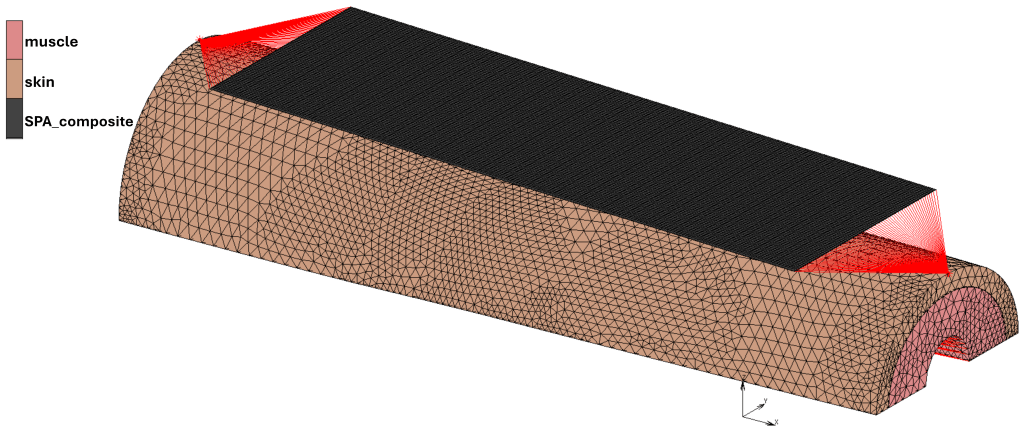
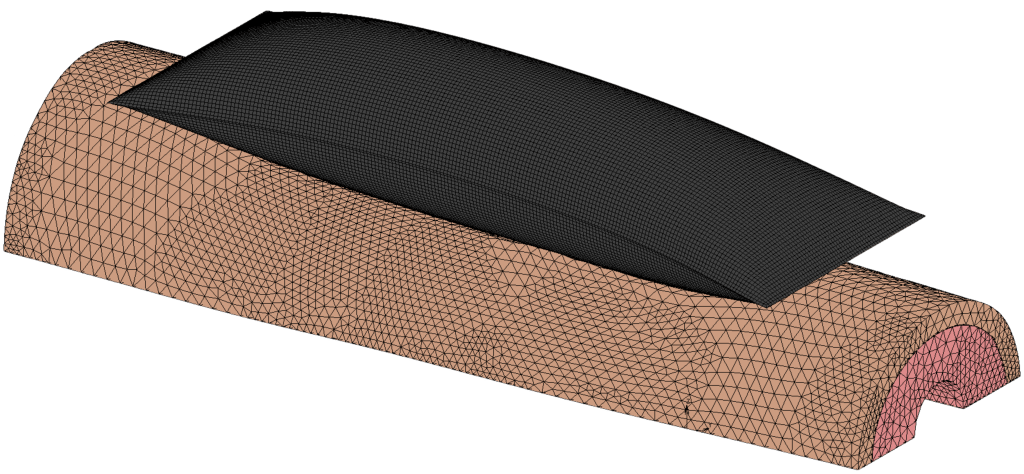
Arm and SPA Model
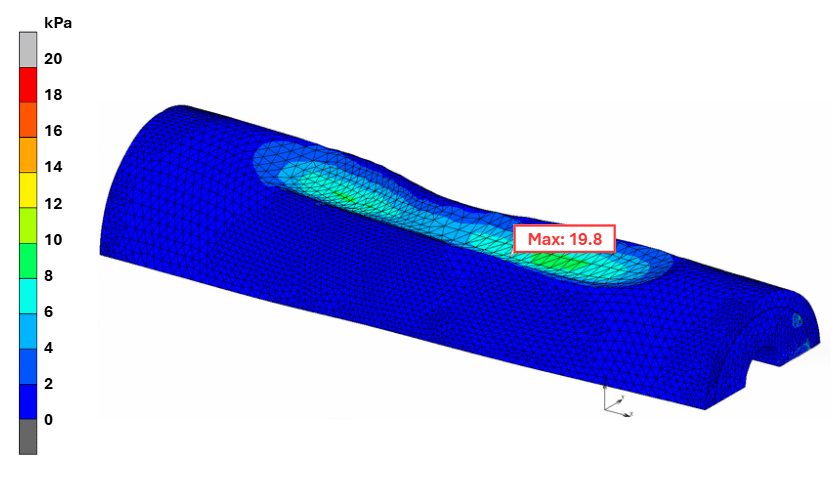
Combining everything together, a final FE model was created and then simulated
Analysing the Results
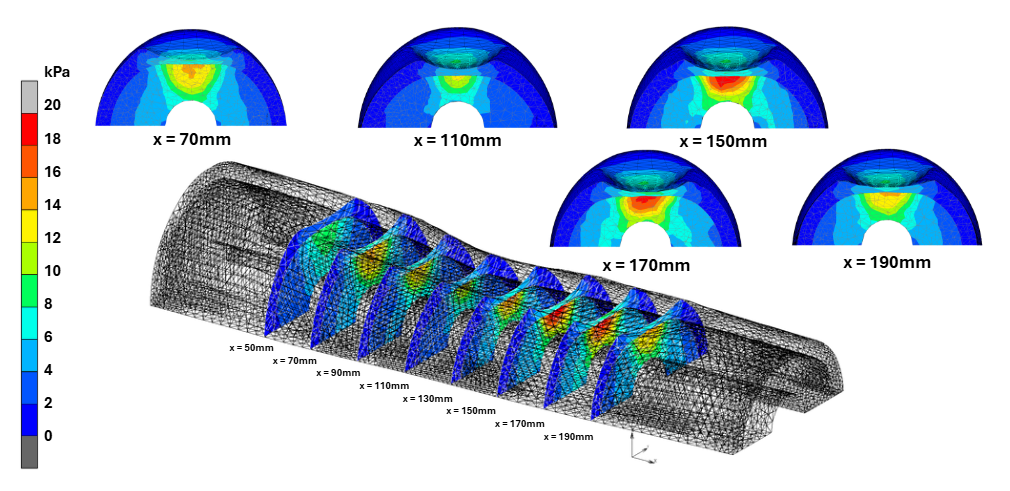
Looking at the von Mises stresses found in the arm, the maximum stress was 19.8kPa. Comparing these results to literature, it is possible that pressure injury would occur.
As expected, higher stresses are found in the muscle compared to the skin.